#include "rlcontroller.h"
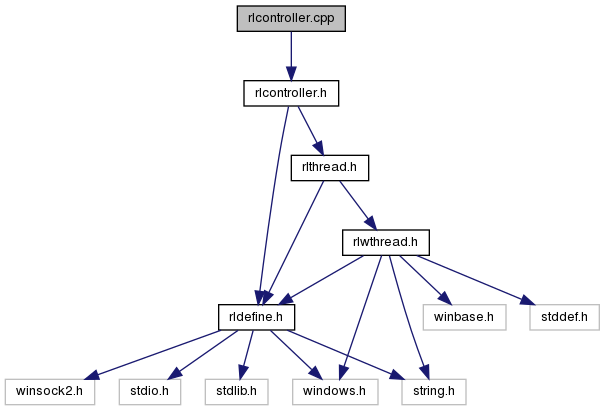
Include dependency graph for rlcontroller.cpp:
Go to the source code of this file.
Functions | |
| static void * | control (void *arg) |
Function Documentation
◆ control()
|
static |
Definition at line 18 of file rlcontroller.cpp.
Definition: rlcontroller.h:27
Definition: rlcontroller.h:37
Definition: rlcontroller.h:36
Definition: rlcontroller.h:40
Definition: rlthread.h:27
Definition: rlcontroller.h:38
Definition: rlcontroller.h:39
Definition: rlcontroller.h:34
Definition: rlcontroller.h:32
Definition: rlcontroller.h:35
Definition: rlcontroller.h:33
