class to manage one node of a CanOpenMaster board in a CanOpen network More...
#include <rlcannode.h>
Public Member Functions | |
| rlCanNode () | |
| rlCanNode (int boardnr, int nodeid, RCS_MESSAGETELEGRAM_10 &_telegramm) | |
| initializes a new cannode by means of SyCon-pre-configurated parameters More... | |
| ~rlCanNode () | |
| calls destructors of rlinifile obj and objdir More... | |
| int | objecttype (int objindex, int subindex) |
| returns the type of a specific entry in the object directory More... | |
| void | showConfiguration () |
| prints out the configuration of the node More... | |
| int | getNodeID () |
| returns the current node ID of the node More... | |
| int | getBoardID () |
| returns the board ID the node is connected to. More... | |
| int | getPdoCount () |
| returns the current number of all installed PDOs (Process Data Objects) More... | |
| int | getReceivePdoCount () |
| returns the current number of all installed reiceive PDOs More... | |
| int | getTransmitPdoCount () |
| returns the current number of all installed transmit PDOs More... | |
| bool | hasMapping () |
| indicates if a node available mapping More... | |
Public Attributes | |
| QPtrVector< rlCanPDO > | pdoList [2] |
| contains transmit PDOs More... | |
Private Member Functions | |
| rlIniFile * | getEDS (const char *_productstr) |
| finds the eds file matching the product string in [DeviceInfo] ProductName More... | |
| void | readConfigurationMessage (RCS_MESSAGETELEGRAM_10 &_message) |
| reads out the configuration of a node from the CanOpenMaster board More... | |
Private Attributes | |
| int | nodeID |
| current node ID (1-127) More... | |
| int | boardID |
| curent board ID (0-3) More... | |
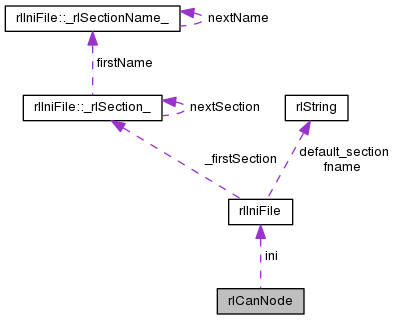
| rlIniFile * | ini |
| ObjDir * | objdir |
| unsigned short | usIdentNumber |
| Unique device number if available. More... | |
| unsigned char | usVendorIdent |
| Unique vendor number if available. More... | |
| QString | abVendorName |
| specific node informations. extracted from message telegramm More... | |
| QString | abDeviceName |
| QString | abDescription |
| QString | edslocation |
| unsigned char | pdocount |
| unsigned char | bMasterAddress |
| unsigned char | bSettings |
Detailed Description
class to manage one node of a CanOpenMaster board in a CanOpen network
Definition at line 48 of file rlcannode.h.
Constructor & Destructor Documentation
◆ rlCanNode() [1/2]
| rlCanNode::rlCanNode | ( | ) |
Definition at line 21 of file rlcannode.cpp.
◆ rlCanNode() [2/2]
| rlCanNode::rlCanNode | ( | int | boardnr, |
| int | nodeid, | ||
| RCS_MESSAGETELEGRAM_10 & | _telegramm | ||
| ) |
initializes a new cannode by means of SyCon-pre-configurated parameters
initializes a new node obj. node is defined by boardid, nodeid and a telegram which contains node specific information from device's dual ported memory
Definition at line 28 of file rlcannode.cpp.
◆ ~rlCanNode()
| rlCanNode::~rlCanNode | ( | ) |
Member Function Documentation
◆ getBoardID()
| int rlCanNode::getBoardID | ( | ) |
returns the board ID the node is connected to.
returns the board ID in witch the node is connected
Definition at line 245 of file rlcannode.cpp.
◆ getEDS()
|
private |
finds the eds file matching the product string in [DeviceInfo] ProductName
iterates through all files in eds directory. opens every eds file and returns a pointer to an ini-file object of the eds file matching the product string in [DeviceInfo] ProductName
Definition at line 109 of file rlcannode.cpp.
◆ getNodeID()
| int rlCanNode::getNodeID | ( | ) |
◆ getPdoCount()
| int rlCanNode::getPdoCount | ( | ) |
returns the current number of all installed PDOs (Process Data Objects)
returns the current number of -all- installed PDOs (Process Data Objects)
Definition at line 280 of file rlcannode.cpp.
◆ getReceivePdoCount()
| int rlCanNode::getReceivePdoCount | ( | ) |
returns the current number of all installed reiceive PDOs
Definition at line 285 of file rlcannode.cpp.
◆ getTransmitPdoCount()
| int rlCanNode::getTransmitPdoCount | ( | ) |
returns the current number of all installed transmit PDOs
Definition at line 290 of file rlcannode.cpp.
◆ hasMapping()
| bool rlCanNode::hasMapping | ( | ) |
indicates if a node available mapping
indicates if node mapping is available. When mapping is active, it is possible to catch a specific Object within a PDO
Definition at line 295 of file rlcannode.cpp.
◆ objecttype()
| int rlCanNode::objecttype | ( | int | objindex, |
| int | subindex | ||
| ) |
returns the type of a specific entry in the object directory
Definition at line 250 of file rlcannode.cpp.
◆ readConfigurationMessage()
|
private |
reads out the configuration of a node from the CanOpenMaster board
reads out the configuration of a node from the device. For success the device must configured by SYCon.
Definition at line 142 of file rlcannode.cpp.
◆ showConfiguration()
| void rlCanNode::showConfiguration | ( | ) |
prints out the configuration of the node
print out the configuration of the node
Definition at line 200 of file rlcannode.cpp.
Member Data Documentation
◆ abDescription
|
private |
Definition at line 129 of file rlcannode.h.
◆ abDeviceName
|
private |
Definition at line 128 of file rlcannode.h.
◆ abVendorName
|
private |
specific node informations. extracted from message telegramm
Definition at line 127 of file rlcannode.h.
◆ bMasterAddress
|
private |
Definition at line 132 of file rlcannode.h.
◆ boardID
|
private |
curent board ID (0-3)
Definition at line 101 of file rlcannode.h.
◆ bSettings
|
private |
Definition at line 133 of file rlcannode.h.
◆ edslocation
|
private |
Definition at line 130 of file rlcannode.h.
◆ ini
|
private |
pointer to inifile. object which handles access to the EDS file describing the object directory of this node
Definition at line 110 of file rlcannode.h.
◆ nodeID
|
private |
current node ID (1-127)
Definition at line 98 of file rlcannode.h.
◆ objdir
|
private |
pointer to objdir which handles access to all items in the object directory of this node
Definition at line 114 of file rlcannode.h.
◆ pdocount
|
private |
Definition at line 131 of file rlcannode.h.
◆ pdoList
| QPtrVector<rlCanPDO> rlCanNode::pdoList[2] |
◆ usIdentNumber
|
private |
Unique device number if available.
Definition at line 121 of file rlcannode.h.
◆ usVendorIdent
|
private |
Unique vendor number if available.
Definition at line 124 of file rlcannode.h.
The documentation for this class was generated from the following files:
